Naveen Kumar Uppalapati
University of Illinois at Urbana Champaign (UIUC)
In Submission
Abstract
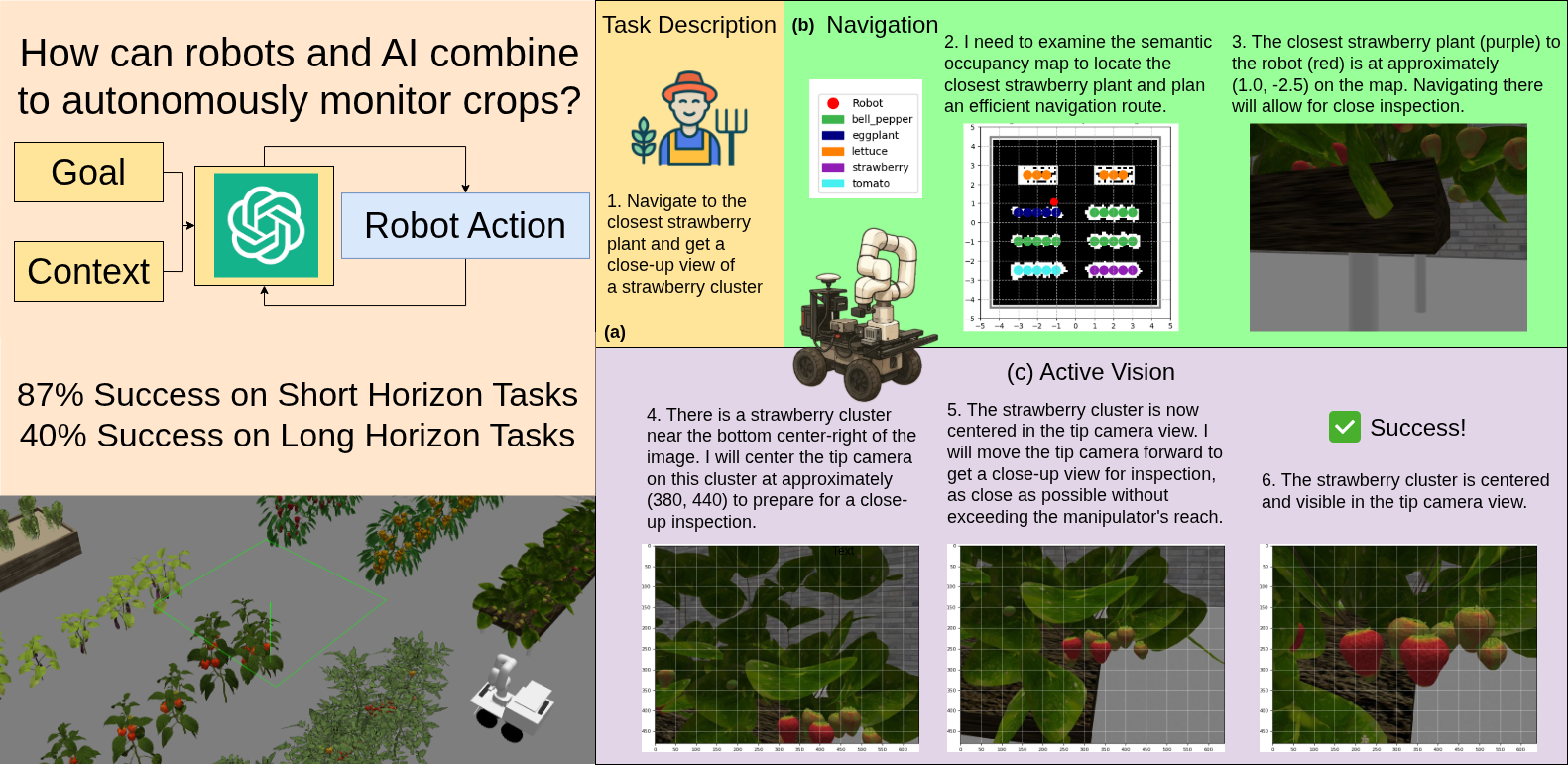
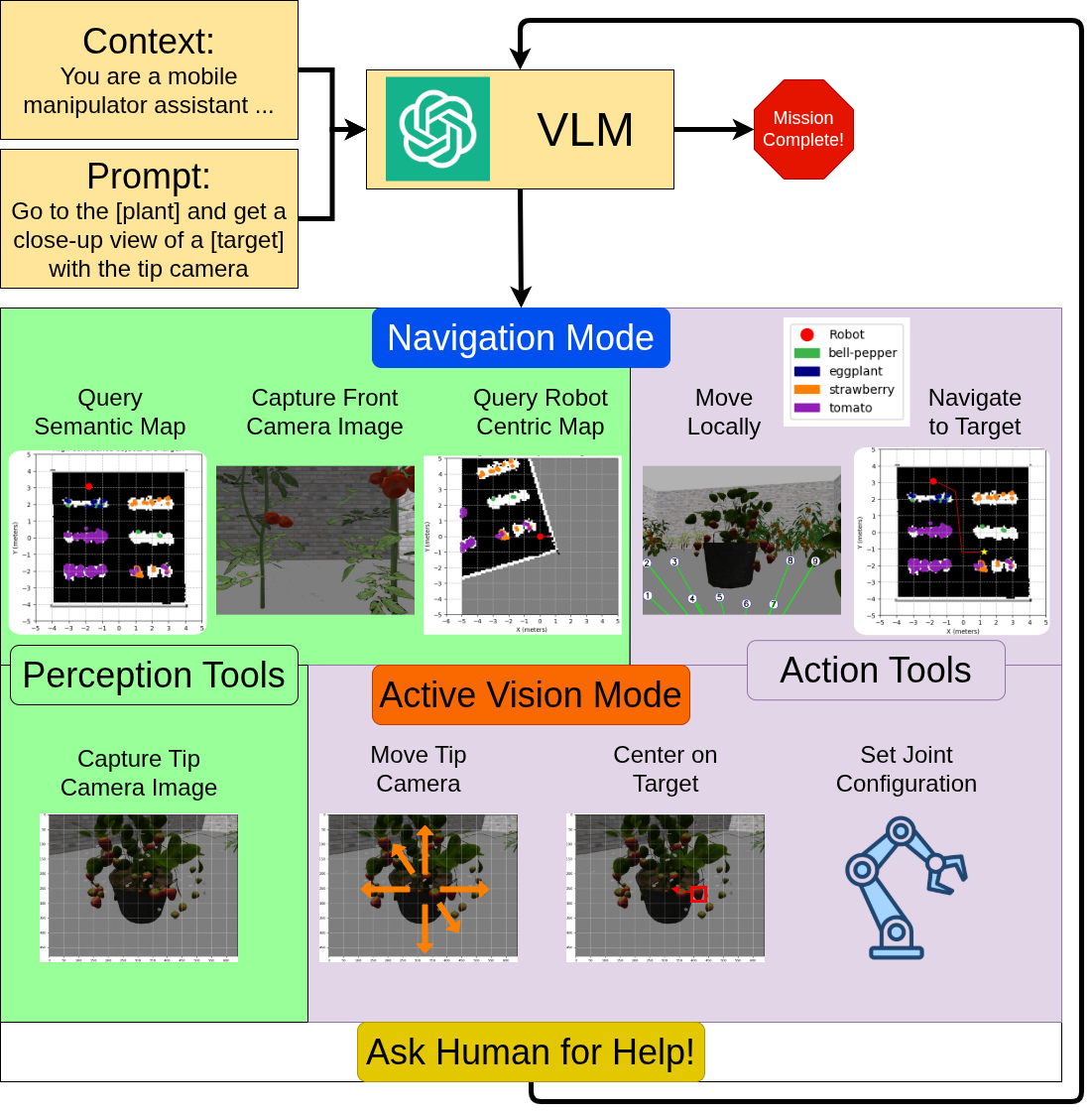
Crop monitoring is essential for precision agriculture, but current systems lack high-level reasoning. We introduce a novel, modular framework that uses a Visual Language Model (VLM) to guide robotic task planning, interleaving input queries with action primitives. We contribute a comprehensive benchmark for short- and long-horizon crop monitoring tasks in monoculture and polyculture environments. Our main results show that VLMs perform robustly for short-horizon tasks (comparable to human success), but exhibit significant performance degradation in challenging long-horizon tasks. Critically, the system fails when relying on noisy semantic maps, demonstrating a key limitation in current VLM context grounding for sustained robotic operations. This work offers a deployable framework and critical insights into VLM capabilities and shortcomings for complex agricultural robotics.