HyReach: Vision-Guided Hybrid Manipulator Reaching in Cluttered Unseen Environments
Soft Robotics, 2026
Journal Paper
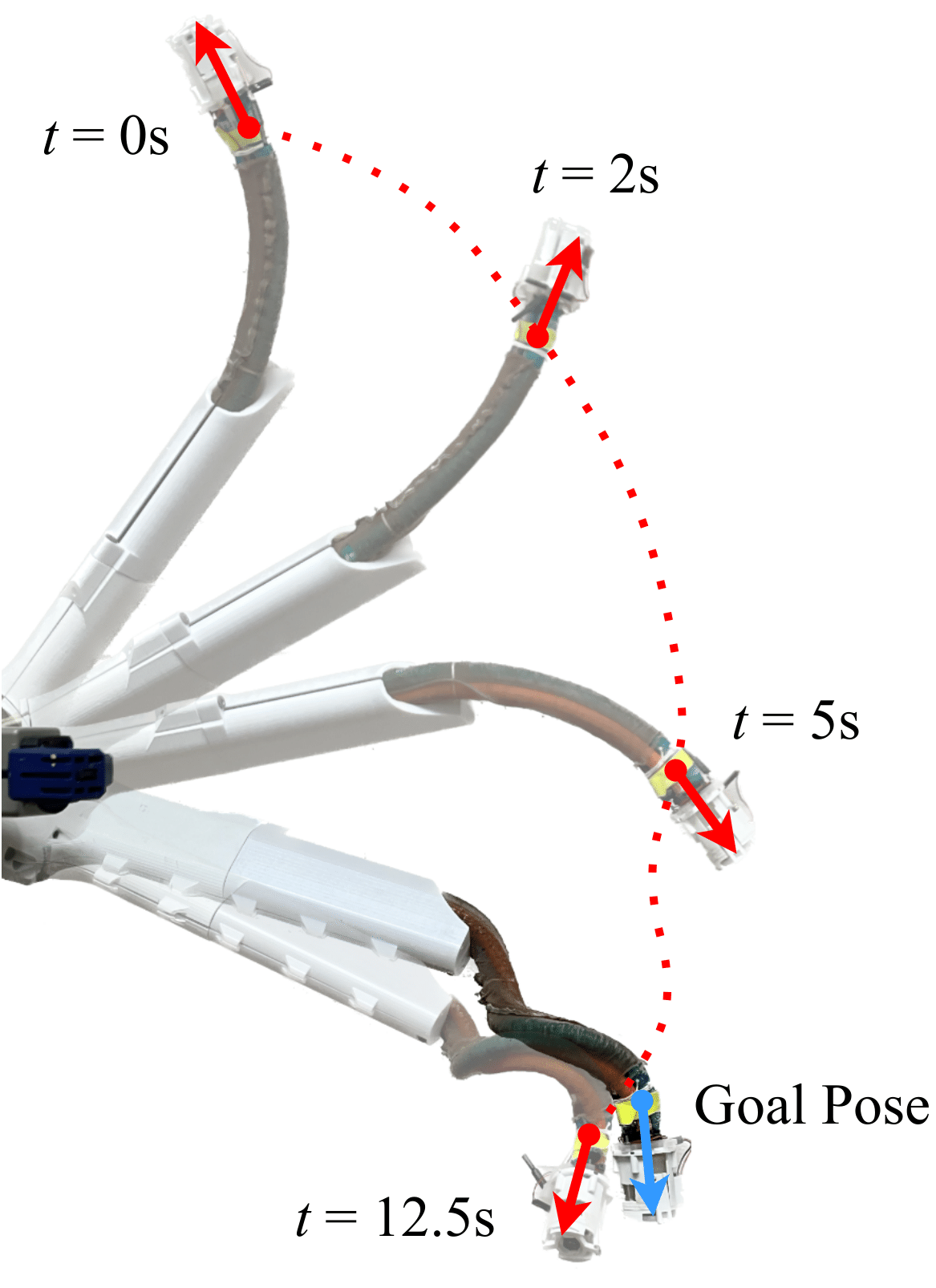
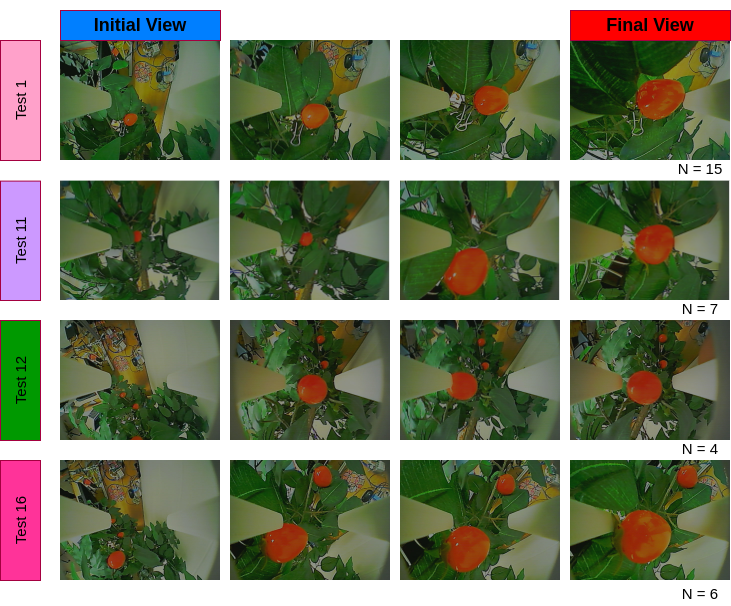
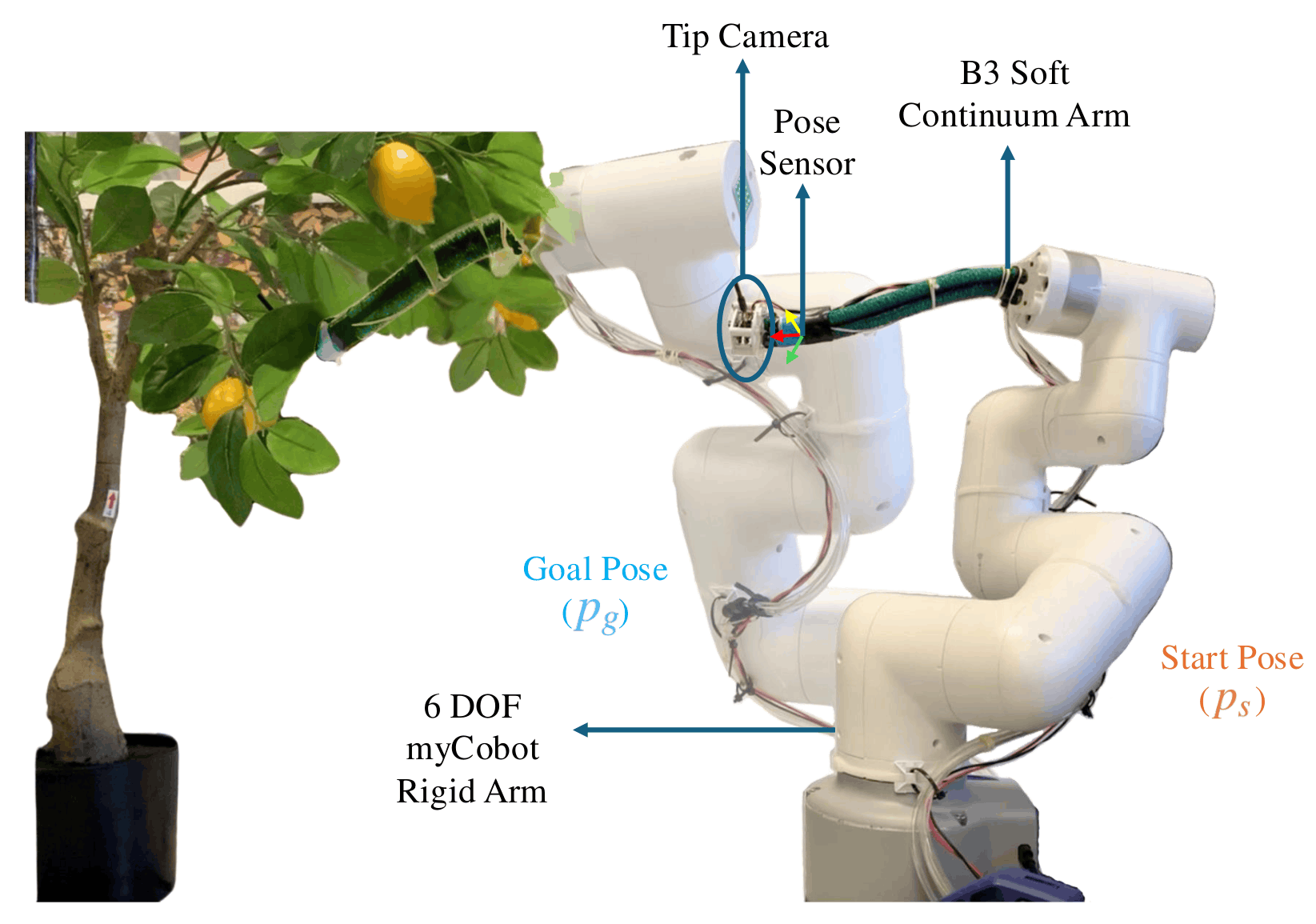
The presented system uses a vision-guided manipulation system for hybrid rigid-soft continuum arms, designed to operate in cluttered and unstructured environments. Leveraging 3D reconstruction and shape-informed path planning, the system facilitates precise object reaching while navigating obstacles.